Ph.D. Research Program by Anais Delepaut.
Tutoring by prof. Fabio Dovis and Pietro Giordano
Abstract
There is a great interest in extending the use of GNSS in Space as witnessed by past studies that are addressingnot only the use on board of LEO, MEO and GEO satellites, but also to support cislunar missions and initiatives.The performance in Space are limited by the very low signal-to-noise ratio at which the receiver has to operate,the high Geometric Dilution of Precision, and other limiting factors. While coupling with proprioceptive andexteroceptive sensors aids to mitigate the limitations of the high Doppler rate, and the low C/N0, geometry canonly be improved by adding additional reference sources. The concept of cooperative GNSS positioning is quiteeff ective when the number of visible GNSS satellites is limited. It is based on the estimation of the baselinebetween a pair of networked GNSS receivers which can rely on a communication link, one of which benefi tingfrom favourable visibility conditions. Such a baseline is integrated as an additional range measurement. It hasspecifi c time variant statistical errors such that, in order to be eff ective, advanced state estimation techniques or new integration concepts must be addressed, such as advanced Bayesian state estimation and machine learning approaches (i.e. recurrent neural networks). Theoretical studies showed that the improvement of precision and accuracy of the position depends on the quality and synchronization of the GNSS measurements, the latency of the channel, but also on the relative position of the cooperating receivers. This opens the door to optimized designs (orbits, communications, GNSS receiver, smart integration, etc.) for new communication and navigation Space systems exploiting this concept. In the context of a next generation of Space initiatives, the innovative concept proposed here could be of interest to different ESA programmes planned for this decade (e.g. Lunar Pathfinder, Moonlight/LCNS and EL3).
Research Questions and Objectives
The state-of-the-art being laid out in the previous section, this part aims to build the bridge between theGNSS-based concept and the use of GNSS technology in Space, to help the reader understanding how CPcould fi t in current Space applications.
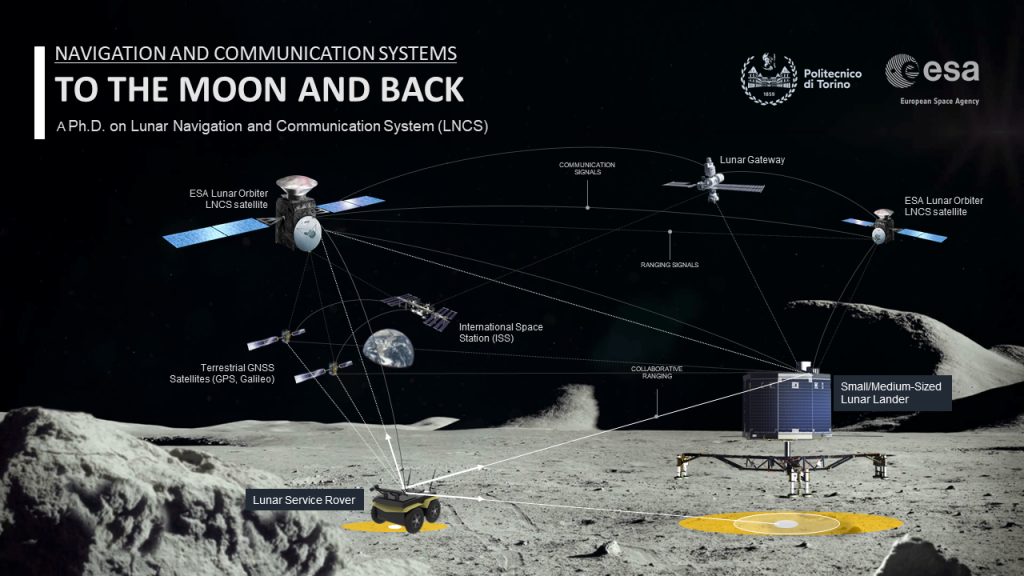
Indeed, the main expected benefi t of GNSS-based CP is an improved geometry (reduced DOP). Since thisaspect represents one of the main limitations for the use of GNSS receivers in Space, CP could have arelevant impact on the quality of the position estimation of Space assets. The improvement of positioningperformance thanks to a multiplicity of networked receivers instead of an increased amount of GNSS-likesatellites is deemed making Space missions cost-eff ective, thus more sustainable [2]. This aspect couldhold for the exploitation of GNSS signals received from current Earth-GNSS constellations but also for theuse of future dedicated navigation systems, such as the Lunar Communication and Navigation Systems(LCNS), by potentially relaxing its requirements.
GNSS along with specifi c CP approaches can actively support network-based ranging and relativepositioning data by also contributing to increasing the precision of the absolute state estimation for S/Cs atthe cost of a communication link between collaborating units.
Featured Publications
[1] Enhanced GNSS-based Positioning in Space Exploiting Inter-Spacecraft Cooperation
Anaïs Delépaut, Alex Minetto, Fabio Dovis, Department of Electronics and Telecommunications (DET) at Politecnico di Torino, Italy; Floor Melman, Pietro Giordano, Directorate of Technology, Engineering and Quality (D/TEC) at ESA-ESTEC, Netherlands; Javier Ventura-Traveset, Directorate of Navigation (D/NAV) at ESA-Toulouse, France